Project Real time Lane Detection
We will train and construct a model that helps detect lanes on straight and curved roads based on the raw pixels captured by the single front-facing camera.

This code was part of the Machine Learning in Python Course Project
Requirements
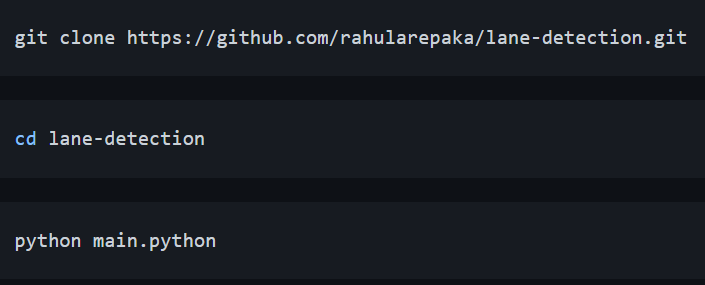
Deployment
Dataset
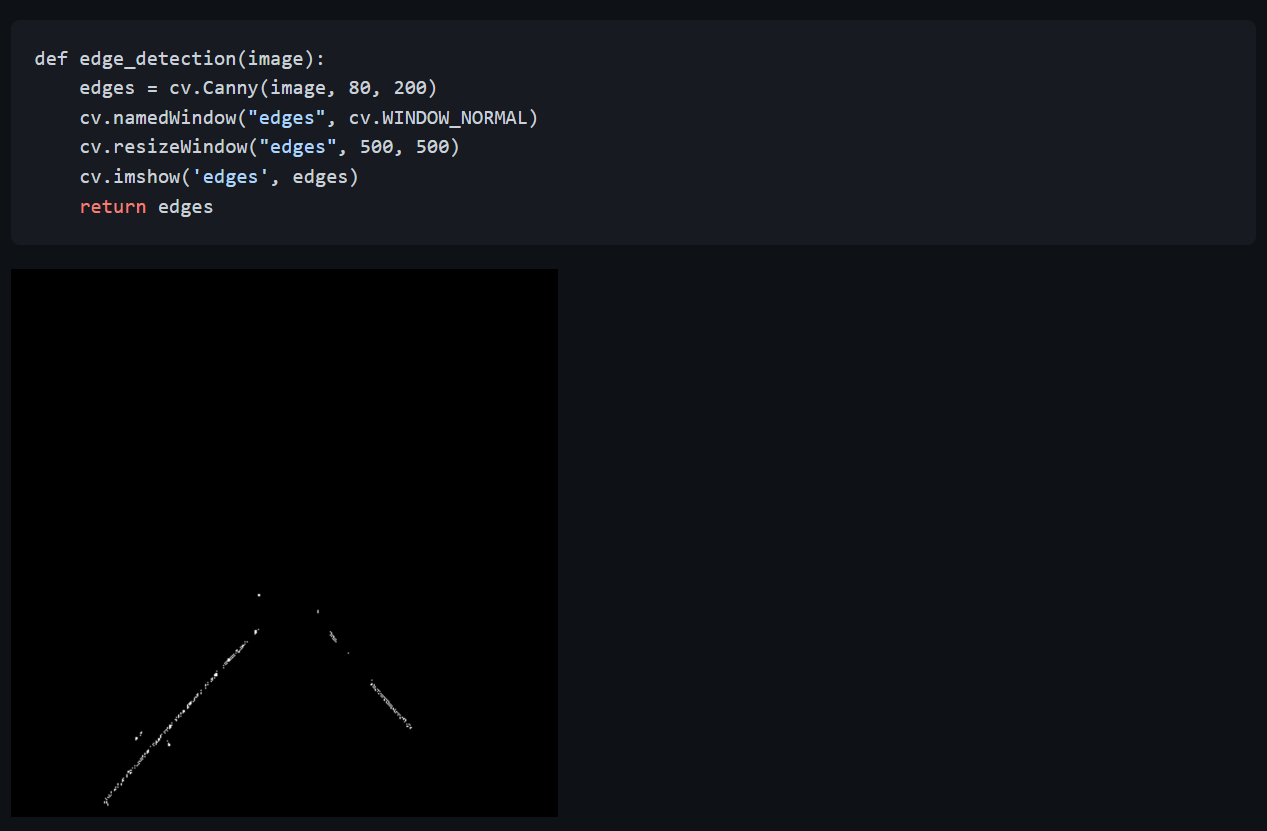
This project demonstrates lane detection using a single image from a road dataset. The lanes are marked by a solid white line (on the right) and alternating short line segments with dots (on the left).
Lane Detection Kaggle : Dataset link

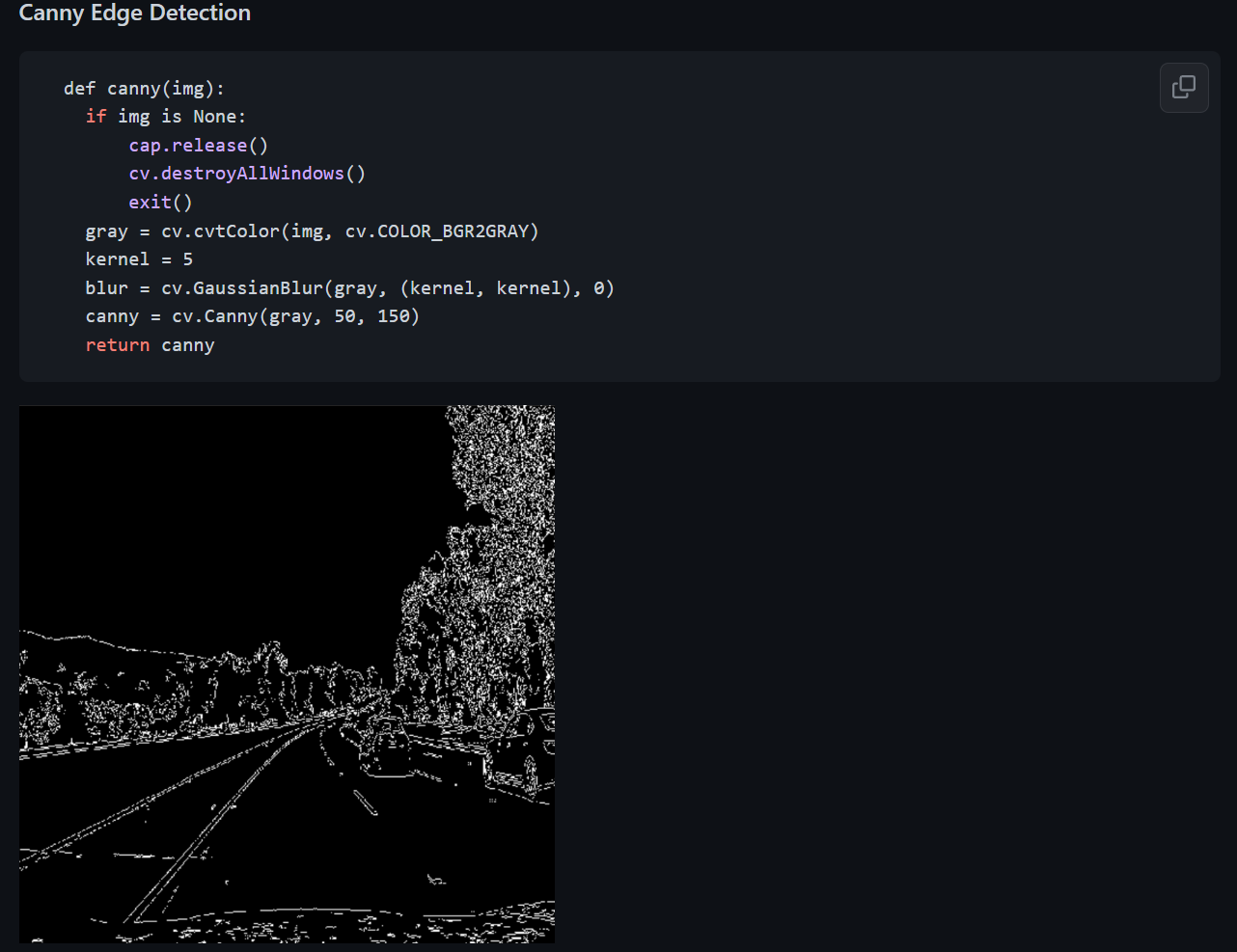
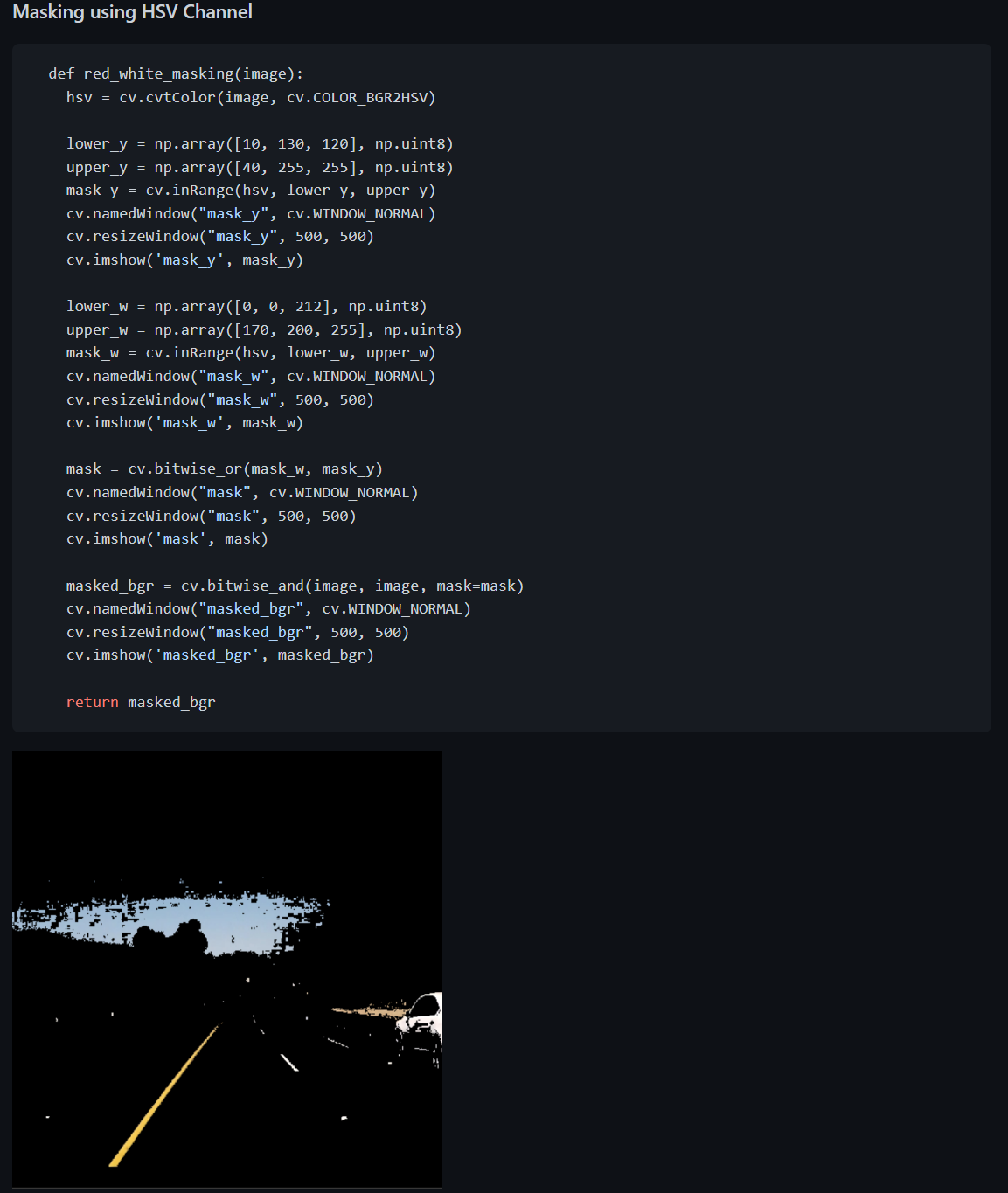
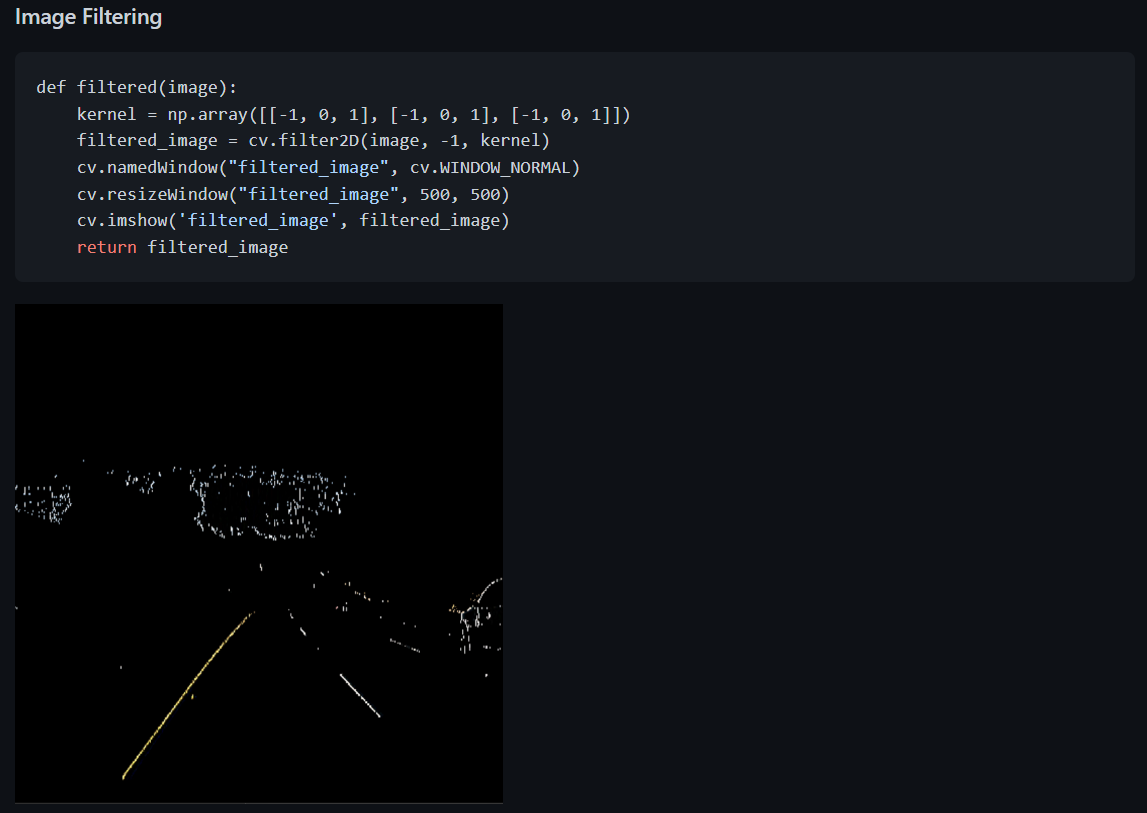
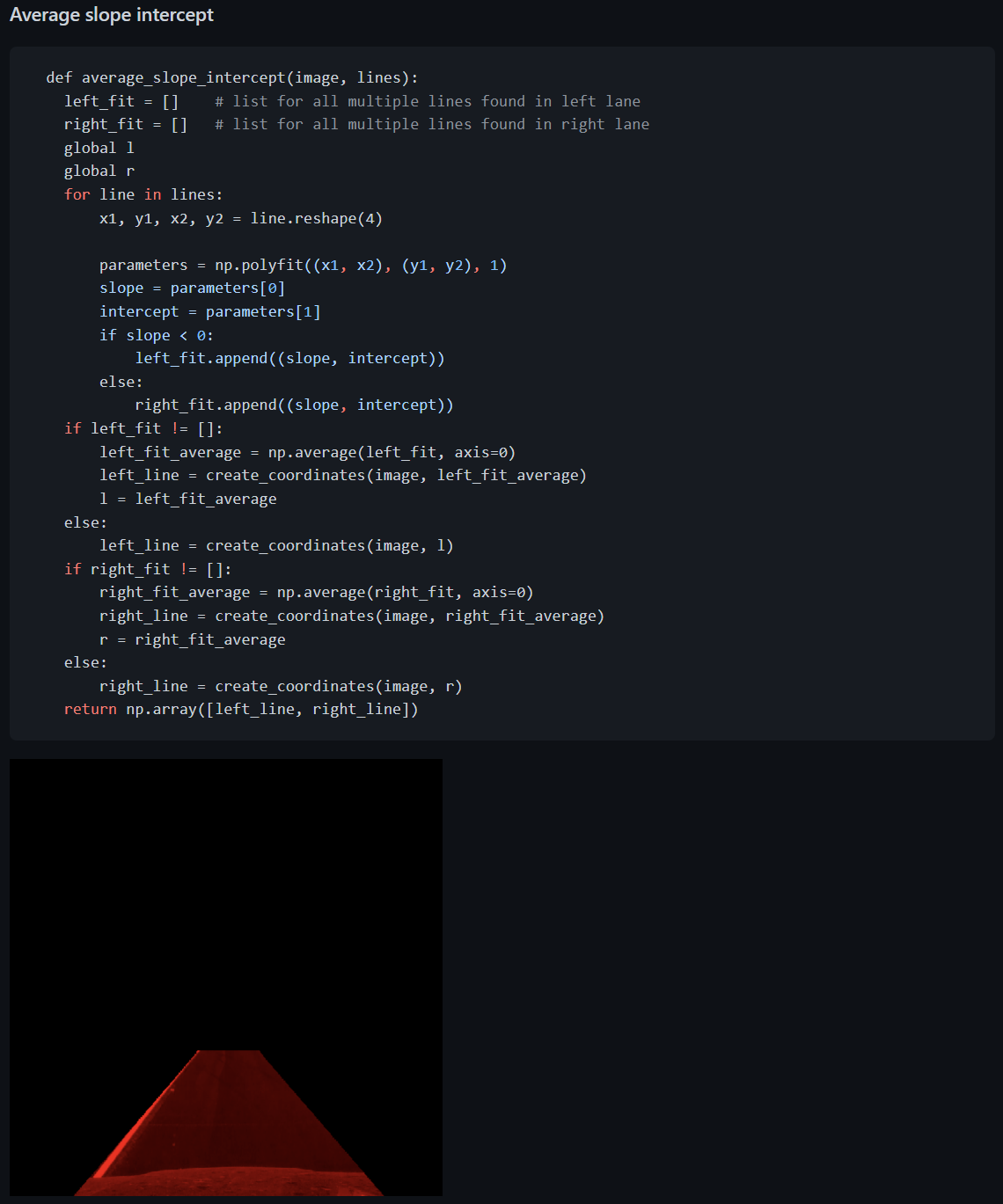
Computer Vision Techniques
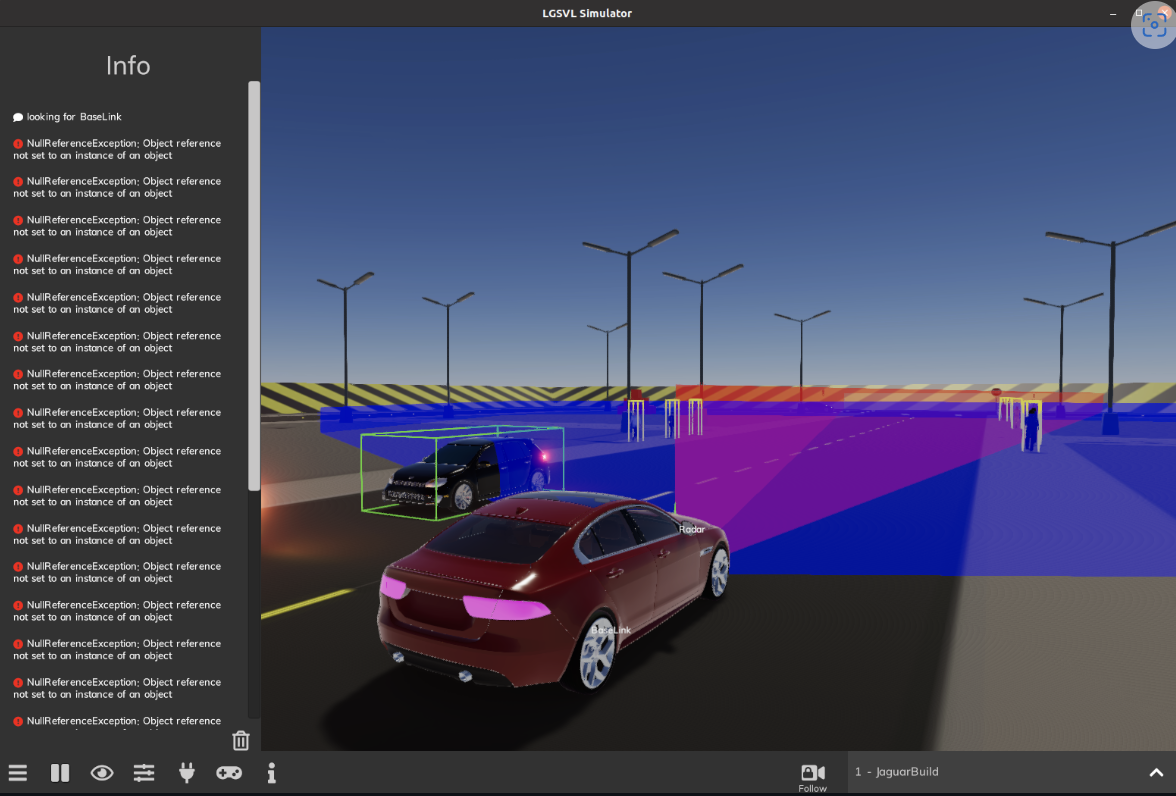
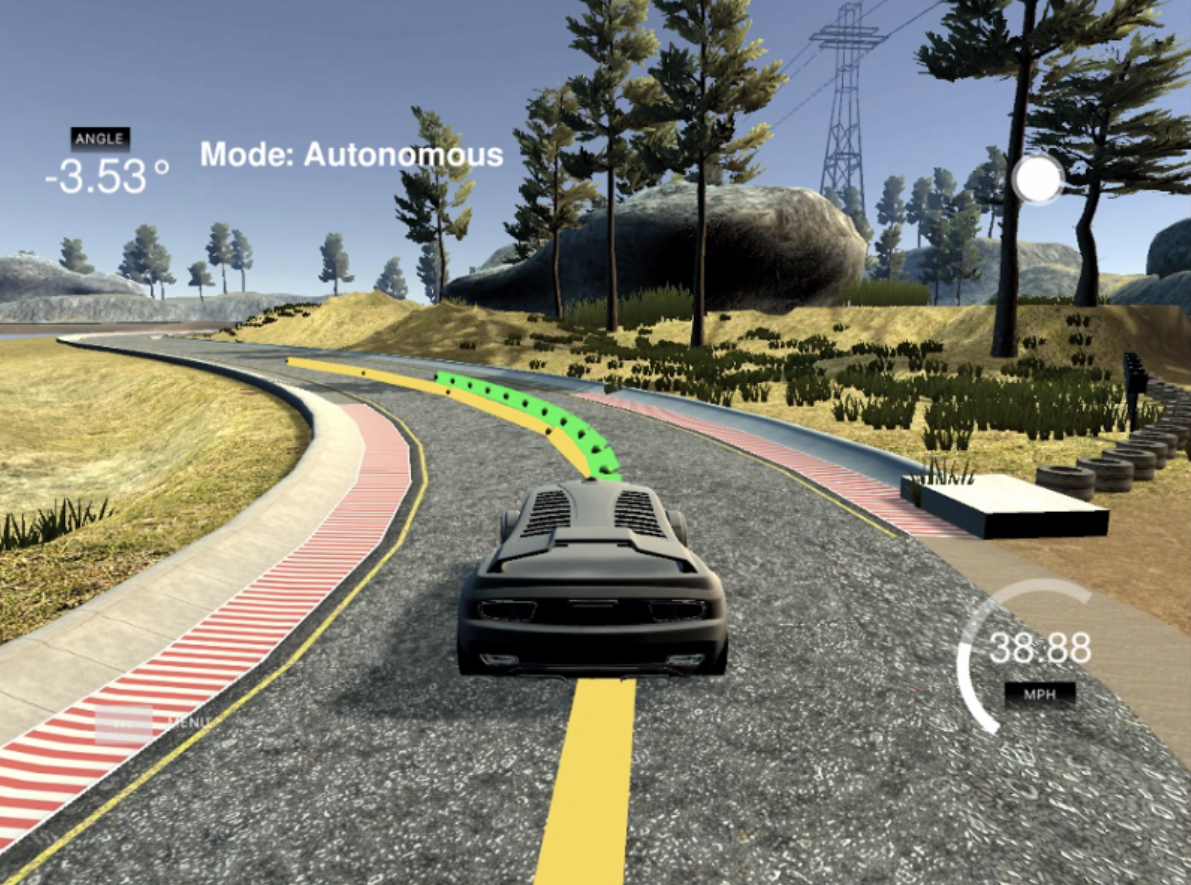
Testing with Simulators